帝国理工学院的研究人员开发了一种用于多种应用的可塑性臂。它也是用户友好的,因为这个机器人可以在增强现实(ar)谷歌的帮助下扭曲成形状。
这项研究发表在 ieee 机器人与自动化杂志上,由 nocloas rojas 博士(帝国理工学院戴森设计工程学院)和共同第一作者博士共同撰写。研究人员 alex ranne(计算系)和 angus clark(戴森设计工程学院),
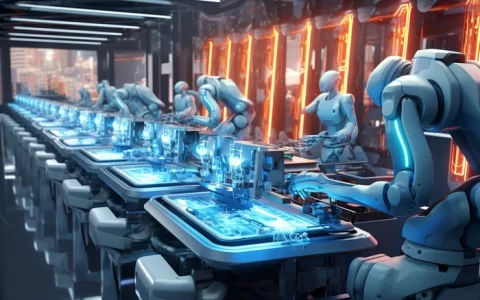
与许多机械臂的僵硬四肢和坚固关节相比,这种具有延展性的机器人具有一定程度的灵活性,可以向各个方向扭转并锁定到位。内部的聚酯薄膜片层光滑,相互滑动,支持这种多功能性。
在实践中,与机器人一起工作的人必须将其弯曲成所需的形状。然而,在没有指导的情况下精确弯曲或扭曲机械臂说起来容易做起来难。正如 rojas 博士所指出的,调整这些机器人的关键问题之一是新位置的准确性。人类不太擅长确保机器人能够准确调整以匹配模板。
这就是为什么研究人员使用 ar 来帮助用户应对这一挑战的原因。帝国理工学院机器人操作:工程、设计和科学的研究人员开发了一种系统,可以帮助用户使用增强现实 (ar) 护目镜准确地塑造机器人。借助混合现实智能眼镜和运动跟踪摄像头,用户只需调整机器人以匹配模板或叠加到他们现实世界环境中的设计。机器人配置成功后,模板将变为绿色,机械臂可以锁定到位。
有了这个,用户可以拥有一系列广泛应用的职位。即使没有太多技术专长,这也简化了调整可锻机器人的想法。该系统在五名具有机器人技术经验但没有操纵可塑性机器人的男性(20-26 岁)上进行了测试。参与者设法准确地塑造机器人,如 ieee 机器人与自动化杂志所发表的那样。
这使得机械臂可以很容易地针对多种应用进行定制,包括制造、建筑和车辆维护。 这种机械臂也可以足够温和,可以在伤病康复中用作额外的手。 此外,由于它重量轻,也可以考虑用于航天器。
原创文章,作者:校长,如若转载,请注明出处:https://www.yundongfang.com/yun136883.html
 微信扫一扫不于多少!
微信扫一扫不于多少!  支付宝扫一扫礼轻情意重
支付宝扫一扫礼轻情意重